所属领域: A 电子信息技术
技术成果简介
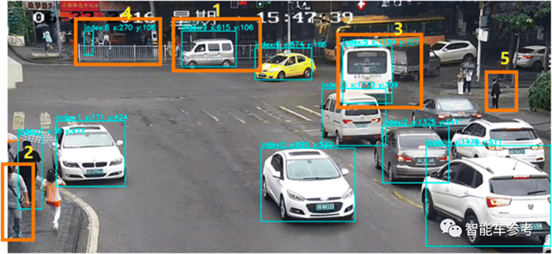
基于视觉方法的运动目标检测作为智能车环境感知的重要组成部分,是智能车环境理解、导航、规划、行为决策与控制的基础,对安全驾驶、行人保护具有重要意义。目前,基于静止相机的运动目标检测主要采用背景相减、帧差法、光流法等方法实现运动目标检测,也得到了广泛的应用,例如对公共场所的人群监控,然而在自动驾驶环境中,相机需要固定在车辆上进行运动目标检测,故现有方法不再适用,而因为相机自身的运动,使目标自身的运动和背景的运动混合在一起,给运动目标的检测带来了很大的困难。现有技术中,也有采用光流技术结合视觉技术对运动目标进行检测,以应用到自动驾驶领域作为智能车的环境感知数据,但其在应用光流技术对道路上障碍物的判断时,受视觉技术中图像复杂度的影响,检测精度只能达到百分之50左右,满足不了智能驾驶对环境感知的要求。针对现有技术中的不足,本发明公开了一种基于视觉的智能车运动目标检测方法,包括:步骤一,基于立体匹配算法对相机采集到的道路图像生成对应的原视差图像,以构建相应的U‑V视差图像;步骤二,基于U‑V视差图像得到与车辆可行驶区域相关的预处理图像;步骤三,基于预处理图像生成与道路上潜在运动相关的感兴趣区,以作为潜在的障碍物目标;步骤四,结合光流和相机自运动属性对障碍物的运动属性进行判断。本发明提供一种基于视觉的智能车运动目标检测方法,通过融合光流和立体视觉计算目标运动的可能性,结合可行使区域检测结果,能有效降低车辆行驶前方中运动目标的误检率。
技术成果前景
其一,本发明通过融合光流和立体视觉计算目标运动的可能性,结合可行使区域检测结果,降低车辆行驶前方中运动目标的误检率,其检测精度可达到70%-80%。其二,本发明的检测方法相对现有技术而方,无需对相机的运动进行约束,可直接用于移动平台的运动目标检测,能够有效的检测动态目标,增强了实用性,采用误差模型降低整个算法中各阶段的估计带来的误差影响,且在算法中融合可行驶区域的检测结果,减少真实场景中复杂景物复杂化、模糊化带来的影响,一定程度上降低运动目标的误检率。