项目简介:
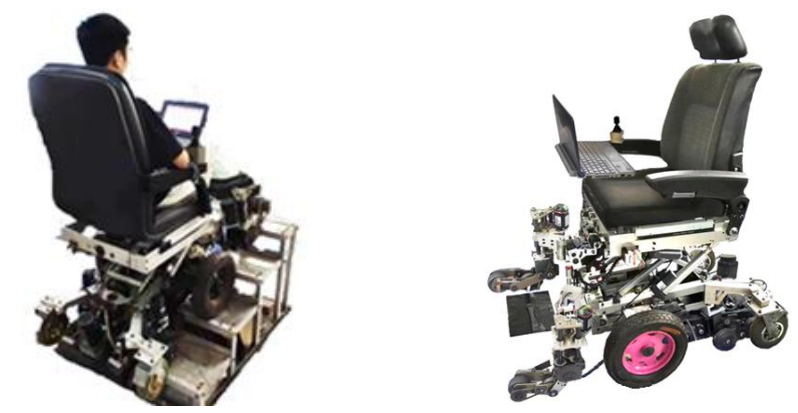
随着人口老龄化不断加剧,我国已步入老龄化社会。为解决行动不便的老年人及残障人士的日常生活需
求,需要他/她们生活自理、辅助出行及康复治疗,设计了一款具有环境感知、爬楼越障、康复训练、人机
交互等多功能的智能轮椅机器人,在我国具有巨大市场潜力和发展空间。多功能智能轮椅机器人可以实现爬
楼、越障、过沟及上坡等复杂环境工况下工作,通过关节变刚度调节可以实现下肢被动式康复训练、主动式
康复训练及抗阻式康复训练。通过有效电机驱动实现关节变刚度调节,其研究对于我国大健康产业发展具有
重要的科学意义和潜在的应用价值,为进一步拓展服务机器人科学前沿奠定基础。
市场前景:
随着社会发展,智能轮椅的市场规模会不断扩大,现在还没有垄断式巨头出现,相关企业大多是刚刚起
步,进入市场较为容易。同时,国家对我国人口老龄化问题越来越重视,关注广大老年人及下肢残疾人的身
体健康,在政策上鼓励智能轮椅的开发和研究,其市场前景广阔,产生社会及经济效益巨大。
实施条件:
该项目需要具备一定的机械设备加工以及电子产品的加工能力,整体上对厂房占地面积不大,技术人员
要求较高。
知识产权情况:
该成果获得授权发明专利4项:一种可重构的轮腿复合式轮椅车,专利号:ZL201310165449.9;一种轮
腿复合式轮椅的前腿机构,专利号:ZL201310165520.3;一种柔性主-被动变刚度关节,专利号:
ZL201911199869.2;一种轮腿复合式轮椅机架,专利号:ZL201310165452.0。